




Autonomous Underwater Robots’ Cooperative Behaviour
A novel cooperative controller design for autonomous underwater vehicles is proposed, implemented and tested. The design procedure follows the basic principles of behaviour-based systems to create two different biomimetic roles, encapsulating the characteristics of an extremely rare cooperative underwater predator behaviour found in the wild: bottlenose dolphins group-hunting with division of labour and role specialization.
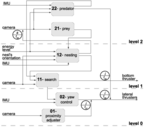
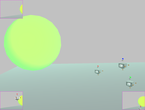
The behaviour-based model is comprised of an hierarchy with different levels of competence, interaction and intercommunication between several behaviour modules. Two distinct, cooperating roles mimicking the driver and the non-driving or barrier members of a hunting bottlenose dolphins group emerged from the behaviour-based subsumption architecture controller designation. This behaviour-based cooperation exploits the driver’s individual capability, in fact a physical gift, of initializing, coordinating a hunting bout, detecting and herding the school of fish along with the contribution of non-driving dolphins ability to comprehend and follow the driver’s master plan and thus act as barriers for the fish trying to escape. Both roles are programmed to act upon sensory information regarding the robot’s environment, provided by a vision sensor module and an inertial measurement unit. The vision sensor detects colour light targets, classifies them according to the experimentation scenario and triggers behaviours’ interaction. The inertial measurement unit supports behaviours’ navigation and guidance necessities.
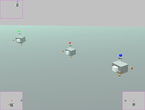
Controller testing, under several simulated scenarios, proved the reliability and modular functionality of the cooperative behaviour-based model and its potential for supporting the autonomy of underwater robotic vessels commissioned in oceanography, environmental monitoring and exploration, serving tasks that can easily be seen as an extent of dolphins’ group hunting. Apart from the simulation, the same behaviour-based controller was tested in real world, with a prototype autonomous vessel. In this case, due to certain limitations of the experimental apparatus, the behaviour-based controller implemented an individual biomimetic role inspired by the real life routines of wandering, hunting, feeding, hiding and nesting exercised by underwater creatures. The individual role, behaviour-based controller was an effort to approach the sea creatures’ autonomy, observed macroscopically as an inevitable iteration and commutation of distinct behaviour modules, guided by the overall objective of staying alive. The prototype robot was commissioned as an experimentation platform for testing the framework of autonomous behaviour-based controllers and materialize the biomimetic metaphor between the maritime environment and a laboratory experimentation area of 1m3
Related Publications
- Piperidis, S.; Tsourveloudis, N.C., "Biomimetic Behaviour Based Underwater Control", Control & Automation (MED), 2014 22nd Mediterranean Conference on, pp. 764-772, Palermo, Italy, June 16-19, 2014, DOI: 10.1109/MED.2014.6961466pdf

- Piperidis S. Tsourveloudis N.C., "Testing controllers on ALE III: A low cost mini Autonomous Underwater Vehicle", Control & Automation (MED), 2013 21st Mediterranean Conference on, pp.551,557, Platanias-Chania, Greece, June 25-28, 2013, DOI: 10.1109/MED.2013.6608776 pdf
- Savvas Piperidis, "Autonomous underwater robots’ cooperative behaviour", Doctoral Dissertation, School of Management and Production Engineering, Technical University of Crete, Chania, Greece, 2013 URI

