

HELLENAK Robotic Vehicle

HELLENAK
The Idea
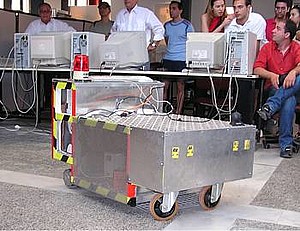
As part of the Mechanical and Production Engineer George Kaloutsakis Diploma thesis, the automated guided industrial vehicle of 200 Kg load capacity HELLENAK, was designed and manufactured. The development of the vehicle took place from 10/2002 to 6/2003. The objective of this task was the construction of a robust and flexible industrial platform for material transfer, when their weight is prohibitive for humans. Vehicles like HELLENAK are considered as the most flexible, safe and efficient management and material transfer system in industrial facilities and storage spaces.
The prototype
The prototype was developed at the Machine Tools Laboratory and Intelligent & Robotic Systems Laboratory with a cost of 3000 euro. The Assistant Professor Nikos Tsourveloudis supervised and guided the HELLENAK development. Initially, the vehicle’s frame was constructed and the rest of the components were assembled on it, as set by the prototype design specifications. These were:
- Tires and electric motors.
- Electric power supply.
- Rechargeable batteries.
- Electronic control devices.
- Sensors, joystick and a video capturing device.
- Unit for control and operation programming.
A check for proper cooperation between components and the programming of vehicle functions followed.This way HELLENAK was ‘born’.
In the future
The success of HELLENAK development in a diploma thesis level, creates a challenge for evolution, as also for the construction of other autonomous vehicles. Potential add-ons on this vehicle consist on programming more complicated functions as cooperating with warehouse management or production line systems. Also, with the addition of laser and ultrasonic sensors extended autonomy capabilities will be achieved.

