

Ongoing Research

- TUCer team 2007-now
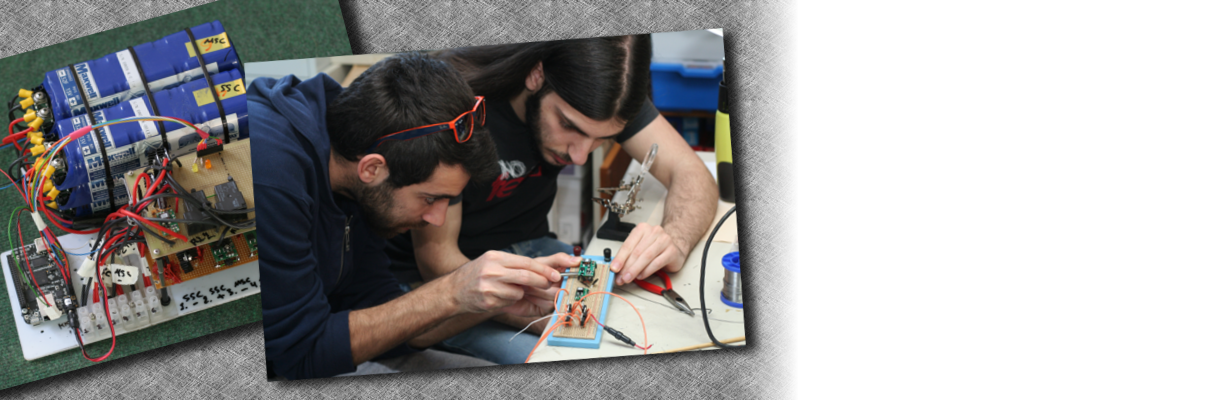
TUCer (Technical University of Crete eco racing) team designs, develops and races with eco friendly - zero emission - urban vehicles, powered by hydrogen fuel cells or batteries since 2007.
Funded by the Technical University of Crete and sponsors.

TUCerous is a low cost and open source modular platform, consisting from off-the-shelf components, which can be used for experimentation and research in the area of autonomous cars and driving.
Funded by the Technical University of Crete and sponsors.

Design of a testing bed for experimenting with the TUCer team prototype electric cars.
Funded by the Technical University of Crete and sponsors.

Development of a prototype robotic base that follows a traveller and carries his baggage.
Funded by the School of Production Engineering and Management of the Technical University of Crete.
- Biomimetic Behavior 2016
Design and programming, in simulation, of biomimetic multi-robot systems that emulate the hunting behavior of gray wolves.

- reDevil autonomous robot 2016-now
reDevil is a ROS powered, open source robotic renovation project of an outdated all terrain, mini class, robotic vehicle produced in 2000.
Funded by the 2017 Postgraduate Studies Program of the School of Production Engineering and Management of the Technical University of Crete.

A novel cooperative controller design for autonomous underwater vehicles is proposed, implemented and tested. The design procedure follows the basic principles of behaviour-based systems to create two different biomimetic roles.

- Krisalos USV 2007
Krisalos is a semiautonomous and potentially fully autonomous USV, developed in IS&RL.
Funded by the Greek Secretariat for Research and Technology and the EADS-3 SIGMA S.A.

Development of a Surveillance System capable of gathering high resolution images and video, thermal information from IR camera and meteorological data from the territory of the Samaria Gorge.
Funded by CRINNO - Crete Innovative Region - Innovative Actions and the Greek Secretariat for Research and Technology.

Development of a prototype autonomous navigation system for unmanned VTOL.
Funded by the European Union and National grants.

Development of an autonomous robotic vehicle.
Funded by the European Union and National grants.

Development of a control system which is able to monitor, record and adjust the olive’s stone process.
Funded by the Greek Secretariat for Research and Technology and A.B.E.A. S.A.

The objective of this research project is the development of an autonomous navigation control system for an unmanned helicopter.
Funded by the Greek Secretariat for Research and Technology and the EADS-3 SIGMA S.A
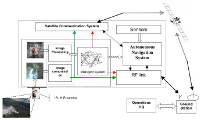
Development of an airborne surveillance system, based on autonomous UAVs, for wildfire detection.
Funded by the Greek Secretariat for Research and Technology through the EU Funds Forum 2000-2006 and the EADS - 3 SIGMA S.A.
- Development of a VTOL Unmanned Aerial Vehicle – Phase I 2003
Funded by the Greek Secretariat for Research and Technology through the EU Funds Forum 2000-2006 and the EADS - 3 SIGMA S.A.
- Development of a Turbo-Jet Engine for an Unmanned Aerial Platform – Phase I 2002
Funded by the Greek Secretariat for Research and Technology through the EU Funds Forum 2000-2006 and the EADS - 3 SIGMA S.A.
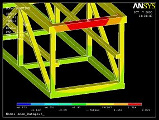
Static and dynamic analysis of a metallic construction which composes a launcher for Unmanned Aerial Vehicles.
Funded by the EADS - 3 SIGMA S.A.

The main research goal of this program is the study of production systems with use of Petri nets and their extensions.
Funded by the Greek Secretariat for Research and Technology through the EU Bilateral Agreements Program Greece – Slovenia 2002-2004.
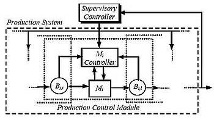
A supervisory control scheme is developed for scheduling single/multiple-part-type, re-entrant production networks.
Funded by the Greek Secretariat for Research and Technology through the EU Bilateral Agreements Program Greece – Slovenia 2000-2002.
- Development of an Intelligent Autonomous Navigation System for Unmanned Aerial Vehicles 1999
Funded by the Greek Secretariat for Research and Technology through the EU Funds Forum 1994 - 1999, No. 99BE118. and the STN ATLAS-3 SIGMA S.A.
- Intelligent and Adaptive Techniques for the Measurement of Manufacturing Flexibility 1999
Funded by the Greek Secretariat for Research and Technology through the EU Bilateral Agreements Program Greece – Slovenia 1998-2000.
- Robust Methodologies for the Integration of a Fleet of Commercially Available Mobile Robots: Application to the Inspection and Security of Office Buildings 1999
Funded by the Greek Secretariat for Research and Technology through the EU Funds Forum 1994 – 1999.

